
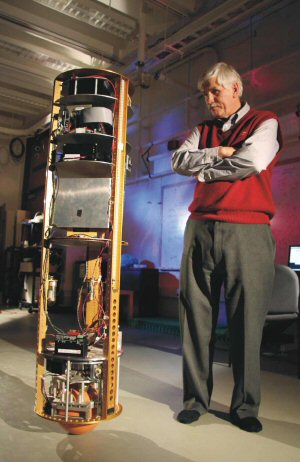
In the past, statically stable mobile robots have had three or more wheels for support, but their bases are generally too wide to move easily among people. They can also tip over if they move too fast or operate on a slope. “We wanted to create a robot that can maneuver easily and is tall enough to look you in the eye,” Hollis said. “Ballbot is tall and skinny, with a much higher center of gravity than traditional wheeled robots [and] because it is omnidirectional, it can move easily in any direction without having to turn first.”
Hollis and his team have demonstrated Ballbot moving on carpeted surfaces and future plans include adding a head and a pair of arms. Swinging the arms, said Hollis, would help to rotate and balance the body. “We want to make Ballbot much faster, more dynamic and graceful,” he said. “But there are many hurdles to overcome, like responding to unplanned contact with its surroundings, planning motion in cluttered spaces and safety issues.”
Hollis has been a pioneer in the field of mobile robots since he began building them as a hobby in the 1950s – well before there were personal computers or easily accessible off-the-shelf parts. In the 1960s, he developed one of the world’s first mobile robots and followed that in the 1970s with the Newt mobile robot, which was one of the first to have an onboard computer. He served as manager of advanced robotics in IBM’s Manufacturing Research Department from 1986 to 1993, when he accepted a position as a senior research scientist at Carnegie Mellon’s Robotics Institute. “When I started building robots, the field didn’t even exist,” said Hollis. “Now the field has grown up around me and I’m in the middle of it. It’s like a dream come true.”
Check out the Ballbot page at CM for more info and some videos!
Source: Carnegie Mellon University
Pic courtesy Michael Goldfein
Related posts:
 Bonobo communication similar to that of human infants, suggests new study
Bonobo communication similar to that of human infants, suggests new study
 Singing primates and tweeting birds: Uncovering human language’s deep origins
Singing primates and tweeting birds: Uncovering human language’s deep origins
 Spread Of Human Virus In Chimps Confirmed
Spread Of Human Virus In Chimps Confirmed
 Primatologists Snap Rare Gorilla Nookie Pic
Primatologists Snap Rare Gorilla Nookie Pic
 Evidence of “Memory” In Molecular Interactions
Evidence of “Memory” In Molecular Interactions
 New Discovery Doubles Age Of First Human Rituals
New Discovery Doubles Age Of First Human Rituals


![Pekoratchi Plan to Turn All Humanity into Rabbits [Usada Blue] picture](/store/img/g/8egAAOSwKgRmL3-S/s-l225/Pekoratchi-Plan-to-Turn-All-Humanity-into-Rabbits-.jpg)


Comments are closed.